





��Ƭ�C����ϵ�y�_�l����
1. �����ƄәC����ϵ�y�ĽY���c���������ƄәC���˿���ϵ�y���OӋ�c�_�l��Ҫ����ģ�K���M���OӋ������ATMEL��˾��ATMEGA16��Ƭ�CоƬ��ͬ�r���ICCAVR7.01ܛ���_�l�h����֧��C�Z�Եij����OӋ��
�����ƄәC����Ӳ����Ҫ��ֱ��늙C��ģ�K���l����ģ�K������ͨ��ģ�K�Լ��o���b�ء�ѭ�������⡢���µ�ģ�K�M�ɡ�
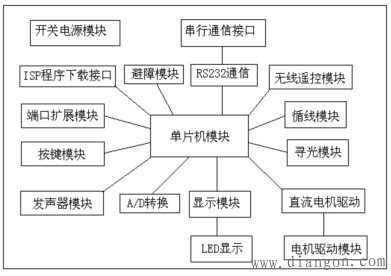
�D1 �����ƄәC���˿���ϵ�yӲ����D
����Ҫ���ܞ飺
�� �t���b�ع���
�t��ͨ�Ų���38K�d����ݔ��ʽ�������L���ҕ�C�b��������t���b�صİl���b�ã����ô����Լ������{ԇ���֣��ҳ��b���������I��ǰ�M�����ˡ����D�����D�Լ�ֹͣ���ľ��a��ͨ�^���̌��F���ơ�
�� ���Ϲ���
�ɼt��l�ͺͽ����b�ÃɴֽM�ɣ����Ԍ��F�l���գ�Ҳ���Ԍ��F����֮�g��ͨ�š��l�Ͳ��ְl�ͼt���d������ǰ��]���ϵK����ܲ��ֲ����յ��d������ǰ�����ϵK��d�������ر�����ģ�K���ܣ�����ͨ�^����ģ�K�Д��Ƿ��յ��d���Ϳ����Д�ǰ���Ƿ����ϵK��
�� ѭ������
��5·����ʽ�t���늂������M�ɣ��z�y���x���{��������4-10mm�������á�
�� �����
��Ҫ�����`�����^�ߵĹ�����裬ͨ�^LM393����̖�Ŵ�������ģ�K��
2. �t���b�ع���
�� �t���b�ع���ԭ��

�D2 �o���b��ϵ�y��D
ͨ���t���b��ϵ�y�ɰl��ͽ��ՃɴֽM�ɡ���Ҫ���þ�/��a���ü����·оƬ���M�в������ơ��l�䲿�����I�P��ꇡ����a�{�ơ�LED�t��l�����M�ɣ����ܲ����ɹ⡢��D�Q�Ŵ��·�����{�Լ���a�·�M�ɣ���D2��ʾ�����ڱ�����У������b�ò���TL538B���ü���оƬ���l���b�ò����L���ҕ�C�b������RK23C����
�� �b����̖�l��
���l�������°��I�����b�شa�l�����������I��ͬ�b�ؾ��aҲ�Ͳ�ͬ���@�N�b�شa��Ҫ��������������
�����}���{�ƵĴ��дa�����}����0.565ms���g����0.56 ms�����ڞ�1.125 ms�ĽM�ϱ�ʾ���M�Ƶġ�0�������}����0.565ms���g����1. 685 ms�����ڞ�2. 25 ms�ĽM�ϱ�ʾ���M�Ƶġ�1�����䲨����D3��ʾ��
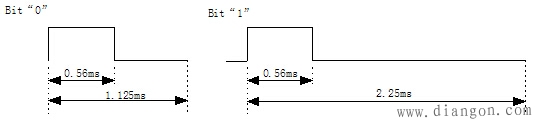
�D3 �b�شa�ġ�0���͡�1��
�����ġ�0���͡�1���M�ɵ�32λ���M�ƴa��38kHZ���d�l�M�ж����{������߰l��Ч�ʣ��_�������Դ���ĵ�Ŀ�ģ�Ȼ����ͨ�^�t��l����O�ܮa���t�⾀�������g�l�䣬��D4��ʾ���b�ؾ��a�a������32λ���M�ƾ��a������ǰ16λ���Ñ��R�e�a���܅^�e��ͬ������O�䣬��ֹ��ͬ�C�N�b�شa����ɔ_����16λ��8λ�����a�����ܴa�����䷴�a��
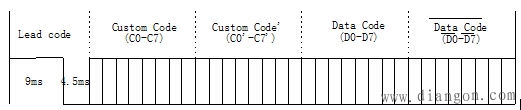
�D4 �t��l�侎�a�D
�b�����ڰ��I���º������Եذl��ͬһ�N32λ���M�ƴa�����ڴ�s��108ms��һ�M�a�����ij��m�r�g�S�������Ķ��M�ơ�0����1���Ă�����ͬ����ͬ����s��45~63ms֮�g,�D5��l�䲨�ΈD��
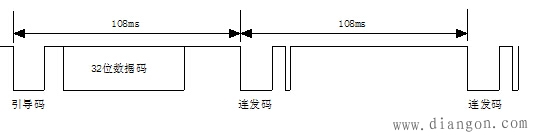
�D5 �b���B�l��̖����
��һ�����I�����³��^36ms����ʎ��ʹоƬ������l��һ�M108ms�ľ��a�}�_���@108ms�l����a��һ�������a��9ms�����Y���a��4.5ms������8λ��ַ�a��9ms~18ms������8λ��ַ�a��9ms~18ms����8λ�����a��9ms~18ms�����@8λ�����ķ��a��9ms~18ms���M�ɣ�������³��^108ms��δ���_�������l��Ĵ��a���B�m�a�����H����ʼ�a��9ms���ͽY���a��2.25ms���M�ɡ�
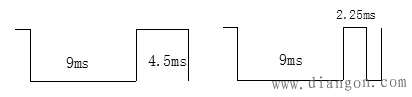
�D6 �����a �D7 �B�l�a
�� �b����̖����
�����·ʹ��һ�N�t����ܺͷŴ���һ�w�ļt�������TL538B������Ҫ�κ����Ԫ����������ɏļt�⾀���ܵ�ݔ���cTLL�ƽ��̖���ݵ����й��������w�e����ͨ�����Ϸ��b���O�ܴ�Сһ�ӣ��m���ڸ��N�t���b�غмt�┵����ݔ��
�� �t���b���·�D
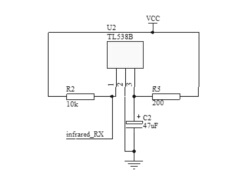
�D8 TL538B�c��Ƭ�C�B�ӈD
�� �t���b�س������̈D
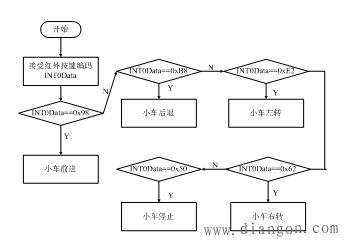
�D9 �t���b�س������̈D
3.�t����Ϲ���
�� �t�����ԭ��
�t����ς���������һ���t����̖�l���c������̖�b�ã��l��ܰl��һ���l�ʵļt����̖�����չܽ����@�N�l�ʵļt����̖�����t��ęz�y���������ϵK������棩�r���t����̖����������չܽ��գ����^̎��֮��ͨ�^���ւ������ӿڷ��ص��C�������C���C���˼������üt�Ⲩ�ķ�����̖���R�e�܇��h����׃����
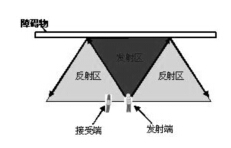
�D10 �l�����ԭ��D
�t�������̖�l���b�ã���D10��ʾ����Ҫ��555���r�������Ԫ��R1��R2��C3��C2�M�ɵĶ��C��ʎ�����ɡ��·�]�з��B���H���ڃɂ������B���·Ҳ����Ҫ����|�l��̖�������Դͨ�^R1��R2��C3��늣��Լ�C3ͨ�^R1���늶�DISCHG��늣�ʹ�·�a����ʎ��www.diangon.com���C3��2/3Vcc��1/3Vcc֮�g��늺ͷ�늣��Ķ���ݔ���˵õ�һϵ�еľ��β��������IJ������D12��ʾ��
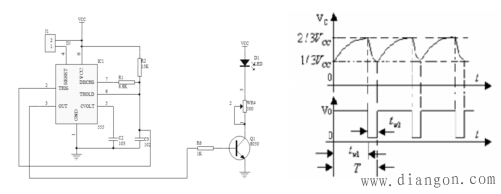
�D11 �t��l���·�D �D12 ���C��ʎ���IJ��ΈD
ݔ����̖�ĕr�g�����ǣ�T=tw1+tw2
tw1=0.7 (R1+R2) C
tw2=0.7R2 C
���У�tw1��Vc��1/3Vcc������2/3Vcc����ĕr�g��tw2�����C3�������ĕr�g��
ע��ͨ�^�{��WR4���{������ֵ�����������p���ϵK����x�ęz�y��
�� �t����ϳ������̈D
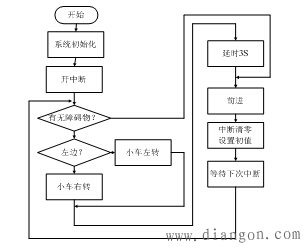
�D13 �t����ϳ������̈D
4. ѭ������
�� ѭ��ԭ��

(a) (b) (c) (d)
�D14 С܇ѭ��ʾ��D
һ����r�£��x������ST178��늂���������̖�քe��A��B��C����D14��ʾ��B�z�y���ھ�����A��C�]�Йz�y������ô�C����С܇ֱ�У���A ̎�ںھ��ϣ�B��C �ڰ�ɫ�^����ô�C����С܇��ƫ�ԳC��·������C ̎�ںھ��ϣ�A��B �ڰ�ɫ�^�t�C����С܇��ƫ�ԳC��·����A ��B ��C ���ںھ��ϕr���C����С܇̎�ںھ�����̎��
�� ѭ���·�D
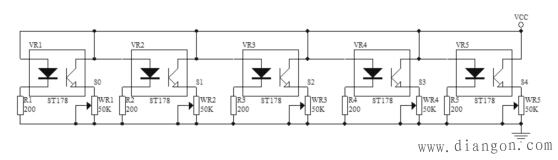
�D15 ST178ѭ���·�D
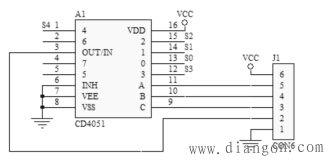
�D16 ��·ͨ���x���·�D

����admin ����ĕr�g��2018-05-08





